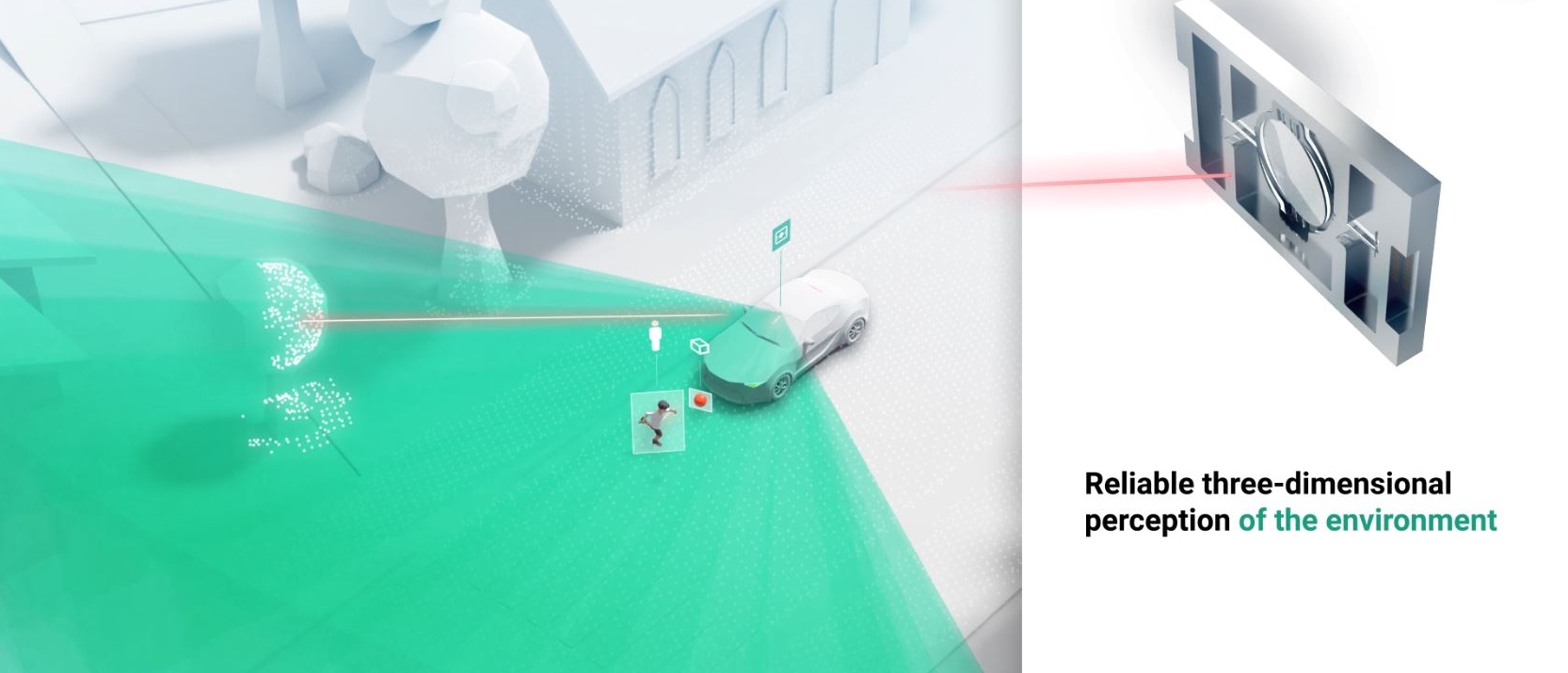
Der Ansatz ist ein „scannenden Auges“, um digitales Sehen in drei Dimensionen zu ermöglichen. Ein Mikrospiegelmodul scannt die Umgebung indem der Spiegel das Licht eines Lasers in zwei Dimensionen verteilt. Die dritte Dimension des vom Objekt reflektierten Lichts wird anhand des Detektorsignals bestimmt. Dabei gibt es unterschiedliche Verfahren wie z.B. die Laufzeitmessung, codierte Pulse oder die Demodulation von FMCW-Signalen.
Aktuelle LiDAR-Systeme für das autonome Fahren beruhen auf großen rotierenden Spiegeln um eine Achse, die aufgrund ihrer Größe und ihres Gewichts schwer in Fahrzeuge integrierbar sind. Weitere Nachteile sind die hohen Herstellungskosten und die Anfälligkeit der rotierenden Teile gegenüber Vibrationen und Schock. Auf diese Weise entstehen Messungenauigkeiten, die im schlimmsten Fall zum Ausfall des Systems und Unfällen führen können. Alternativen sind sogenannte Solid State Lidar, die ohne beweglichen Teile auskommen und aufgrund ihrer geringen Größe integrierbar sind, allerdings können diese nur schwer Objekte in weiterer Entfernung erfassen. Für sicheres autonomes Fahren sind Erfassungsbereiche von wenigen Zentimetern bis zu mehreren hundert Metern notwendig.
Die entwickelten MEMS-Spiegel erfassen ihre Umgebung sicher in allen Reichweiten. Zudem sind sie so leicht und integrierbar, dass sie trotz ihrer Beweglichkeit durch Vibrationen im Automobil nicht beeinflusst werden und so ihre Umgebung ohne Messunschärfen detektieren. Damit erfüllen Scannerspiegeldesigns sowohl über mechanische Beweglichkeit als auch die Stabilität eines Solid State LiDAR. Auf diese Weise kann autonomes Fahren sicher umgesetzt werden. Da der vom IPMS entwickelte MEMS-Scanner aus einkristallinem Silizium hergestellt wird, ist er zudem äußerst robust, schockstabil und ermüdungsfrei. Kostengünstige Halbleiterherstellungsprozesse ermöglichen Skalierungseffekte bei der Herstellung. Die CMOS-Kompatibilität des Halbleiterchips ermöglichen außerdem eine hohe Integrationsfähigkeit in bestehende Systeme.
 Fraunhofer-Allianz autoMOBILproduktion
Fraunhofer-Allianz autoMOBILproduktion